Las levas son unos mecanismos compuestos generalmente por un eslabón impulsor llamado "leva" y otro eslabón de salida llamado "seguidor" entre los que se transmite el movimiento por contacto directo.
Son mecanismos sencillos, poco costosos, tienen pocas piezas móviles y ocupan espacios reducidos. Además su principal ventaja reside en que se pueden diseñar de forma que se obtenga casi cualquier movimiento deseado del seguidor.
CLASIFICACIÓN DE LAS LEVAS
Los mecanismos de leva se pueden clasificar teniendo en cuenta como son la "leva" y el "seguidor".
Teniendo en cuenta la leva, (Fig. 6-1):
a) Leva de placa, llamada también de disco o radial.
b) Leva de cuña.
c) Leva cilíndrica o de tambor.
d) Leva lateral o de cara.
Teniendo en cuenta el seguidor:
a) Seguidor de cuña.
b) Seguidor de cara plana.
c) Seguidor de rodillo.
d) Seguidor de cara esférica o zapata curva.
Otra clasificación de las levas se puede hacer teniendo en cuenta el movimiento del seguidor, pudiendo ser éste rectilíneo alternativo (traslación) u oscilante (rotación). Teniendo en cuenta la posición relativa entre el seguidor y la leva, pueden ser de seguidor centrado, cuando el eje del seguidor pasa por el centro de la leva o de seguidor descentrado.
 Tipos de levas: a) de placa, b) de cuña, c) de tambor y d) de cara.
Tipos de levas: a) de placa, b) de cuña, c) de tambor y d) de cara.  Tipos de seguidor: a) de cuña, b) de cara plana, c) de rodillo y d) de zapata.
Tipos de seguidor: a) de cuña, b) de cara plana, c) de rodillo y d) de zapata.El tipo de leva más común es el formado por una leva de placa y un seguidor de rodillo con movimiento rectilíneo alternativo.
DIAGRAMA DE DESPLAZAMIENTO
El diagrama de desplazamiento "y = f (θ)" (Fig. 6-3) representa, en el caso más general, la posición del seguidor respecto de la posición de la leva. Por ejemplo en una leva de placa con seguidor de movimiento rectilíneo alternativo, representaría la posición del seguidor respecto del ángulo girado por la leva, pero en otros casos, tanto "y" como "θ", pueden ser desplazamientos lineales o angulares.
 Diagrama de desplazamiento.
Diagrama de desplazamiento.Un movimiento muy típico a conseguir por medio de un mecanismo de leva es el movimiento uniforme en el cual la velocidad del seguidor será constante siempre que sea constante la velocidad de la leva, (quizás sería mejor llamarlo movimiento proporcional). Este tipo de movimiento queda reflejado en el diagrama de desplazamiento por medio de un segmento rectilíneo.
 Desplazamientos, velocidades y aceleraciones del seguidor
Desplazamientos, velocidades y aceleraciones del seguidor Si se tuviese una leva con la que se pretende, por ejemplo, realizar: una subida con movimiento uniforme, una detención y finalmente un retorno, y no se tomase ningún tipo de precaución resultaría que podrían aparecer aceleraciones del seguidor tendiendo a infinito, tal como se ve en la figura
Si la aceleración del seguidor tiende a infinito, también lo harán las fuerzas de inercia, con lo que llegarían a romperse las piezas que componen la leva. Como esto es inadmisible, se debe prever un diagrama de desplazamiento que no produzca discontinuidades en el diagrama de velocidades.
Para suavizar el inicio o final de un movimiento uniforme se suele utilizar una rama de parábola, consiguiendo que las pendientes de los tramos de parábola coincidan con la pendiente del movimiento uniforme.
 Tramos de parábola. a) Unión de movimiento uniforme y b) dibujo del tramo.
Tramos de parábola. a) Unión de movimiento uniforme y b) dibujo del tramo. Cuando se desea realizar un desplazamiento del seguidor de subida y bajada sin detenciones, un movimiento muy adecuado es el armónico (Fig. 6-6), ya que este tipo de movimiento tiene velocidades y aceleraciones que son funciones continuas.
 Diagrama de desplazamiento con movimiento armónico
Diagrama de desplazamiento con movimiento armónicoSi se desea que el seguidor realice unos desplazamientos de subida y bajada entre detenciones, un movimiento adecuado es el cicloidal (Fig. 6-7), puesto que este movimiento tiene aceleraciones nulas al inicio y al final, correspondiéndose con las aceleraciones nulas de las detenciones.
 Fig. Diagrama de desplazamiento con movimiento cicloidal
Fig. Diagrama de desplazamiento con movimiento cicloidalDERIVADAS DEL DIAGRAMA DE DESPLAZAMIENTO
En una leva de placa con seguidor de movimiento rectilíneo alternativo, que es la más común, el diagrama de desplazamiento, ecuación (6-1), representa la posición del seguidor en función del ángulo girado por la leva.
y = f(θ) (6-1)
El diagrama de desplazamiento (6-1) se puede derivar respecto de "θ" y respecto de "t".
Derivando (6-1) respecto de "θ" se tendrá:

Estas derivadas dependen solamente del perfil de la leva y son independientes de la velocidad de giro de la leva. La primera derivada (y') representa la pendiente del diagrama de desplazamiento y sus unidades serían, por ejemplo, milímetros / radian. La (y") representa la pendiente de la (y') y sus unidades serían, por ejemplo, milímetros / radián2.
Derivando (6-1) respecto de "t" se tendrá:
Derivando (6-1) respecto de "t" se tendrá:
 Las derivadas primera y segunda del diagrama de desplazamiento respecto de "t" representan la velocidad y aceleración del seguidor respectivamente.
Las derivadas primera y segunda del diagrama de desplazamiento respecto de "t" representan la velocidad y aceleración del seguidor respectivamente.Entre las derivadas de (6-1) respecto de "θ" y respecto de "t" existen las siguientes relaciones:
 to que es muy común en las máquinas, la aceleración sería:
to que es muy común en las máquinas, la aceleración sería:A = ω2·y"
6.5 - MOVIMIENTOS ESTÁNDAR DE LAS LEVAS
Para conseguir cualquier tipo de movimiento en el seguidor, no siempre resultará suficiente con los movimientos que se han visto en el apartado anterior, por ello, hay toda una serie de curvas estándar por medio de las cuales resultará más sencillo enlazar los movimientos deseados de forma que resulten funciones continuas tanto el diagrama de desplazamiento como sus dos primeras derivadas.
Este tipo de curvas están basados en curvas armónicas y cicloidales y son las que se acompañan a continuación, primero las de subida completa.

Diagrama de desplazamiento y derivadas para el movimiento armónico simple de subida completa

Diagrama de desplazamiento y derivadas para el movimiento cicloidal de subida completa

Diagrama de desplazamiento y derivadas para el movimiento armónico modificado de subida completa
A continuación las tres curvas estándar de retorno completo.
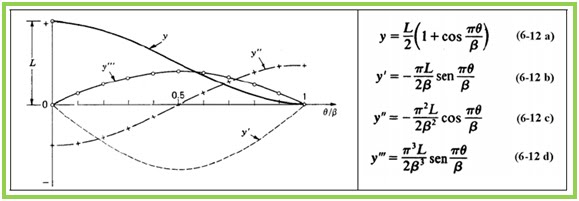 Diagrama de desplazamiento y derivadas para el movimiento armónico simple de retorno completo
Diagrama de desplazamiento y derivadas para el movimiento armónico simple de retorno completo
Diagrama de desplazamiento y derivadas para el movimiento cicloidal de retorno completo
 Diagrama de desplazamiento y derivadas para el movimiento armónico modificado de retorno completo
Diagrama de desplazamiento y derivadas para el movimiento armónico modificado de retorno completoCuando no se tiene que realizar una subida o bajada completa, por ejemplo desde una detención hasta un tramo de movimiento uniforme, se utilizan trozos de movimiento armónico o cicloidal, tanto de subida como de bajada y son los que se exponen a continuación.
 Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte baja,
Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte baja,
 Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte alta
Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte alta

Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de subida, parte baja
 Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de subida, parte alta
Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de subida, parte alta
 Diagrama de y derivadas para el movimiento semicicloidal de bajada, parte alta
Diagrama de y derivadas para el movimiento semicicloidal de bajada, parte alta
 Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de bajada, parte baja
Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de bajada, parte baja
 Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte baja,
Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte baja,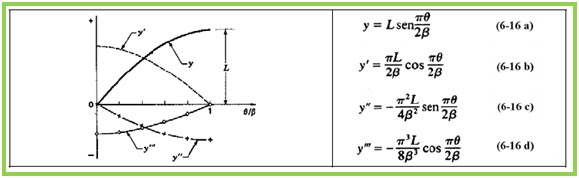 Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte alta
Diagrama de desplazamiento y derivadas para el movimiento semiarmónico de subida, parte alta
Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de subida, parte baja
 Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de subida, parte alta
Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de subida, parte alta Diagrama de y derivadas para el movimiento semicicloidal de bajada, parte alta
Diagrama de y derivadas para el movimiento semicicloidal de bajada, parte alta Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de bajada, parte baja
Diagrama de desplazamiento y derivadas para el movimiento semicicloidal de bajada, parte bajaUna vez escogidos los movimientos estándar más apropiados para cada tramo, se debe intentar conseguir que tanto el diagrama de desplazamiento como las velocidades y aceleraciones sean funciones continuas, para conseguirlo se pueden variar la elevación y la amplitud de los movimientos estándar.
La continuidad es imprescindible en los diagramas de desplazamiento y de velocidades cuando son levas que giran a gran velocidad, aunque es recomendable siempre.
DISEÑO GRÁFICO DE PERFILES DE LEVAS
Una vez establecido como debe ser el diagrama de desplazamiento, se debe dibujar el perfil de la leva que haga que se cumpla el diagrama previsto. El perfil de la leva será diferente en función del seguidor sobre el que actúe.
Para dibujar el perfil de la leva se inicia dibujando el seguidor en la posición correspondiente al punto "0" del diagrama de desplazamiento. Se realiza una inversión cinemática haciendo girar el seguidor en sentido contrario al del giro de la leva y dibujándolo en varias posiciones de acuerdo con el diagrama de desplazamiento. El perfil de la leva será la curva envuelta por las diferentes posiciones que alcance el seguidor.
Cuanto en mayor número de posiciones se dibuje el seguidor, mayor será la precisión del perfil de la leva.

Fig. Diseño del perfil de una leva con seguidor de rodillo centrado. Superficie de la leva desarrollada manteniéndola estacionaria y haciendo girar al seguidor en sentido contrario al del giro de la leva.
 Trazado del perfil de una leva de placa con seguidor de rodillo descentrado
Trazado del perfil de una leva de placa con seguidor de rodillo descentrado
 Trazado del perfil de una leva de placa con seguidor de cara plana
Trazado del perfil de una leva de placa con seguidor de cara plana
 Fig. Trazado del perfil de una leva de placa con seguidor de rodillo oscilante
Fig. Trazado del perfil de una leva de placa con seguidor de rodillo oscilante

Fig. A: Fuerzas estáticas en una leva de placa y seguidor de rodillo
 Fig. B: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor positiva
Fig. B: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor positiva
 Fig. C: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor negativa
Fig. C: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor negativa
La continuidad es imprescindible en los diagramas de desplazamiento y de velocidades cuando son levas que giran a gran velocidad, aunque es recomendable siempre.
DISEÑO GRÁFICO DE PERFILES DE LEVAS
Una vez establecido como debe ser el diagrama de desplazamiento, se debe dibujar el perfil de la leva que haga que se cumpla el diagrama previsto. El perfil de la leva será diferente en función del seguidor sobre el que actúe.
Para dibujar el perfil de la leva se inicia dibujando el seguidor en la posición correspondiente al punto "0" del diagrama de desplazamiento. Se realiza una inversión cinemática haciendo girar el seguidor en sentido contrario al del giro de la leva y dibujándolo en varias posiciones de acuerdo con el diagrama de desplazamiento. El perfil de la leva será la curva envuelta por las diferentes posiciones que alcance el seguidor.
Cuanto en mayor número de posiciones se dibuje el seguidor, mayor será la precisión del perfil de la leva.

Fig. Diseño del perfil de una leva con seguidor de rodillo centrado. Superficie de la leva desarrollada manteniéndola estacionaria y haciendo girar al seguidor en sentido contrario al del giro de la leva.
 Trazado del perfil de una leva de placa con seguidor de rodillo descentrado
Trazado del perfil de una leva de placa con seguidor de rodillo descentrado Trazado del perfil de una leva de placa con seguidor de cara plana Fig. Trazado del perfil de una leva de placa con seguidor de rodillo oscilante
Trazado del perfil de una leva de placa con seguidor de cara plana Fig. Trazado del perfil de una leva de placa con seguidor de rodillo oscilanteFUERZAS EN LEVAS
En las levas se pueden considerar dos tipos de fuerzas:
- Estáticas, debidas a las fuerzas exteriores que actúan sobre el seguidor y a la fuerza del muelle.
- Dinámicas, debidas a la masa del seguidor.
Si no se toma ningún tipo de precaución, la fuerza entre el seguidor y la leva debe ser positiva, ya que sino se perdería el contacto entre ellos dejando de ser un mecanismo.
En la figura A pueden verse las fuerzas estáticas en una leva de placa y seguidor de rodillo que es una de las levas más comunes.
En la figura B se pueden observar las fuerzas dinámicas cuando la aceleración del seguidor es positiva.
Finalmente, en la figura C se muestran las fuerzas dinámicas cuando la aceleración del seguidor es negativa.
En las levas se pueden considerar dos tipos de fuerzas:
- Estáticas, debidas a las fuerzas exteriores que actúan sobre el seguidor y a la fuerza del muelle.
- Dinámicas, debidas a la masa del seguidor.
Si no se toma ningún tipo de precaución, la fuerza entre el seguidor y la leva debe ser positiva, ya que sino se perdería el contacto entre ellos dejando de ser un mecanismo.
En la figura A pueden verse las fuerzas estáticas en una leva de placa y seguidor de rodillo que es una de las levas más comunes.
En la figura B se pueden observar las fuerzas dinámicas cuando la aceleración del seguidor es positiva.
Finalmente, en la figura C se muestran las fuerzas dinámicas cuando la aceleración del seguidor es negativa.

Fig. A: Fuerzas estáticas en una leva de placa y seguidor de rodillo
 Fig. B: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor positiva Fig. C: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor negativa
Fig. B: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor positiva Fig. C: Fuerzas dinámicas en una leva de placa y seguidor de rodillo siendo la aceleración del seguidor negativa
disculpa cual es tu bibliografia
ResponderEliminarson fotos recortadas del libro de David Myszka ya te puedes imaginar
Eliminardespués de 4 años... que te den las gracias por tu trabajo debe ser reconfortante, o frustrante. GRACIAS.
ResponderEliminarEsto fue de mucha ayuda. Mil Gracias!!
ResponderEliminarmuchas gracias, me ayudaste un buen.
ResponderEliminarHola! estoy buscando las curvas de desplazamiento de medio retorno(bajada) parte alta, de movimiento semiarmonico, las busque aqui no di con ellas, las tendras? Gracias!
ResponderEliminarhola buen dia, me gustaria saber si podras hecharme la mano con un problema, ya que no tengo muchos conocimientos sobre este tema, pero el maestro siente que con 30 minutos de enseñanza podemos resolver con un grado de dificultad de expertos.. rock.sammael@live.com.mx
ResponderEliminarSaludos me podrían ayudar para hallar el diámetro base de la leva con un seguidor de rodillo.
ResponderEliminarEste es mi correo si habrá una persona que me pueda ayudar con este punto que necesito..abiezer14@hotmail.com
ResponderEliminar